接觸仿真分析的基本原理是什么?(3)
有限元:
2017-05-24 10:15:51
閱讀數(shù):
3814
分享到:
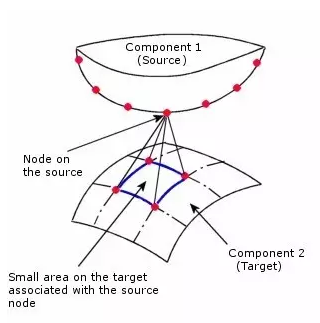
有了接觸控制方程�����,下面就是要進行離散化�����。這里我們以node-to-surface和罰函數(shù)法為例說說接觸項的離散�。Node-to-surface,顧名思義�����,兩個接觸面中,slave面由節(jié)點代表��,master面由單元面代表��。接觸檢測算法能保證每個slave節(jié)點至少對應(yīng)一個master面�,這就是所謂的接觸單元。
不像平常我們遇到的結(jié)構(gòu)單元���,接觸單元是沒有實體對應(yīng)的單元概念�����,其任務(wù)是在離散化的時候負責(zé)接觸項的離散����。換句話說�,接觸單元的任務(wù)是在離散模型中聯(lián)系兩個接觸體并傳遞內(nèi)力。所以�,借用罰函數(shù)法的闡釋,不妨把接觸單元理解為接觸體之間的彈簧或者膠水���。有趣的是��,“膠水”這個比喻恰恰是處理區(qū)域分解的Mortar法的意思���,而Mortar法在surface-to-surface接觸中應(yīng)用非常多。要注意的是�,根據(jù)搜索算法和幾何構(gòu)型情況,slave節(jié)點可以同時和多個master平面形成接觸單元�����。
在把接觸面離散為接觸單元后�,力平衡方程弱解形式中的接觸項就變成了下面這個樣子。意思是說����,接觸面上的虛功由slave節(jié)點和master單元面組成的接觸單元構(gòu)成。像上次一樣��,我們?nèi)匀恢豢紤]最簡單的沒有摩擦的形式�。
既然是基于位移的有限元,那么上面這個接觸項就應(yīng)該用位移來表示�����。所以�,最后一步就是把形函數(shù)和等參元條件加進來。于是接觸壓力和接觸體距離(gap)的變分表示為
意思是說�,在接觸單元�,接觸壓力是接觸距離的函數(shù)(回憶一下罰函數(shù)法的彈簧概念)�。接觸距離是slave節(jié)點位置和master單元面表示。而master單元面又是由描述該單元的節(jié)點位置和形函數(shù)表示��。所以這么一來大家都變回了位移-形函數(shù)的形式�。這也是所有有限元離散的基本思路:控制方程-弱解-形函數(shù)表達。
于是至少現(xiàn)在我們在形式上把問題變得和常見有限元形式一致了����。后面的就是組成剛度矩陣求解了。因為接觸壓力的表達形式也含有位移(再回憶下罰函數(shù)彈簧)�,所以通常要求解非線性方程,那于是就交給牛頓法了�。
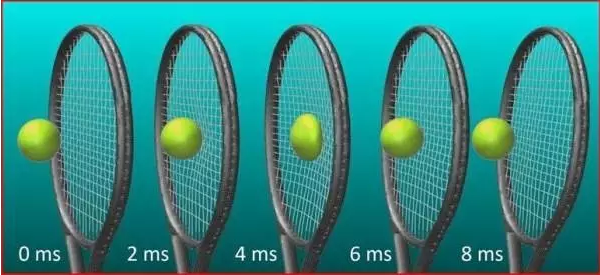
這個系列我們只說了最簡單的情形:正面無摩擦接觸和罰函數(shù)法。把滑動和摩擦加進來之后�,問題還要糾結(jié)地多。另外��,線單元與線單元的接觸也有很多技術(shù)細節(jié)����。上面說的方法的還有一個前提:用戶事先定義接觸體。但在實際應(yīng)用中���,還有很多問題事先是不知道誰和誰會接觸的���。比如說下圖網(wǎng)球擊打球拍的問題�����。動力模擬之前是不知道球體和哪根線單元發(fā)生接觸的。于是現(xiàn)代求解器都朝著自動解除的傻瓜方向發(fā)展�,比如說現(xiàn)在ABAQUS已經(jīng)基本實現(xiàn)了,Ansys��,OptiStruct等也在陸續(xù)實現(xiàn)�����。
本文出自深圳有限元科技有限公司官網(wǎng):tyrp.net 轉(zhuǎn)載請注明




